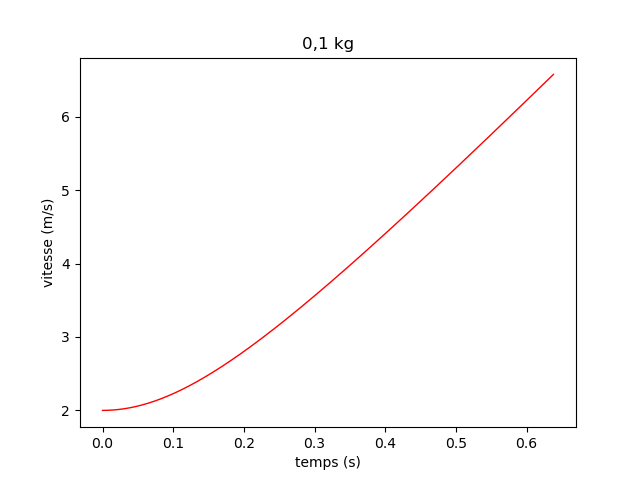


En projetant sur un repère cartésien, on obtient le système d’accélérations de \(M\). Puis en intégrant ces expressions par rapport au temps, on en déduit les systèmes de vitesses et de position de \(M\).
$$$$
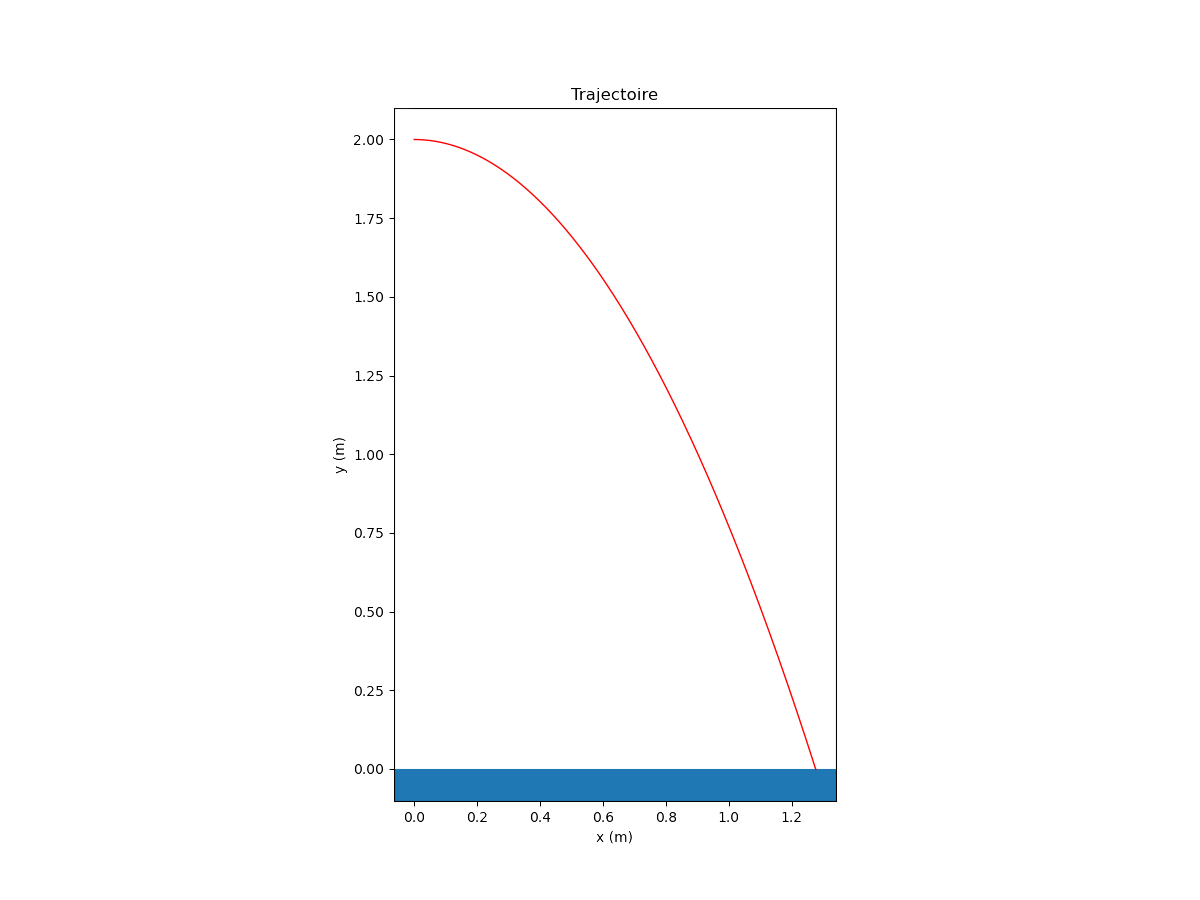
Supposons que le mouvement se fait dans le plan \((O,x,z)\). En déduisant que \(t=\frac{x\left(t\right)-x_0}{{\dot{x}}_0}\), on conclut sur l’équation de la trajectoire \(z(x)\) : $$z\left(x\right)=-\frac{g}{2}\left(\frac{x-x_0}{{\dot{x}}_0}\right)^2+{\dot{z}}_0\left(\frac{x-x_0}{{\dot{x}}_0}\right)+z_0$$
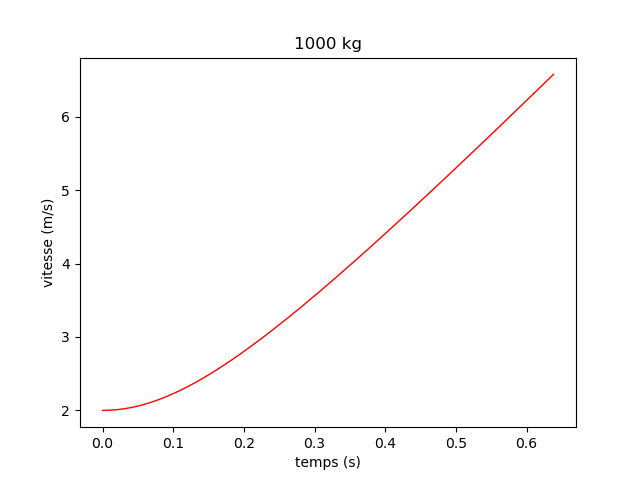
Pour simplifier l’expression, on peut supposer que la position initiale du corps est à l’origine du repère.$$z\left(x\right)=-\frac{g}{2{{\dot{x}}_0}^2}x^2+\frac{{\dot{z}}_0}{{\dot{x}}_0}x$$On démontre à nouveau que la masse n’est pas impliquée dans l’équation de la trajectoire, donc le mouvement d’un corps est indépendant de sa masse.