On peut aussi utiliser la force d'attraction gravitationnelle pour être plus précis, qui décrit l’attraction mutuelle entre deux corps. Son expression est $$F_g = G\frac{m_1 m_2}{r^2}$$ avec, \(G=6,67\cdot{10}^{-11}N\cdot{m}^{2}\cdot{kg}^{-2}\) : la constante de gravitation ; \(m_1\ m_2\) : les masses des deux corps et \(r\) la distance entre le centre des deux corps.
Chloé Meynaud
5 mai 2023
5 mai 2023
Introduction
Dans cette partie, nous allons expliquer comment, à partir des lois physiques, on peut prévoir la trajectoire d’une mini-fusée.
Les principes physiques que nous utiliserons pour cette étude sont les lois de Newton et plus particulièrement la 2ème loi de Newton aussi appelée Principe Fondamental de la Dynamique (PFD). Celui-ci énonce que la somme des forces qui s’appliquent à un solide est égale à sa masse multipliée par son accélération. Pour en apprendre plus sur les lois de Newton, vous pouvez regarder les vidéos suivantes :
Bilan des forces
Tout d’abord, quelles sont les forces qui agissent sur la fusée ?
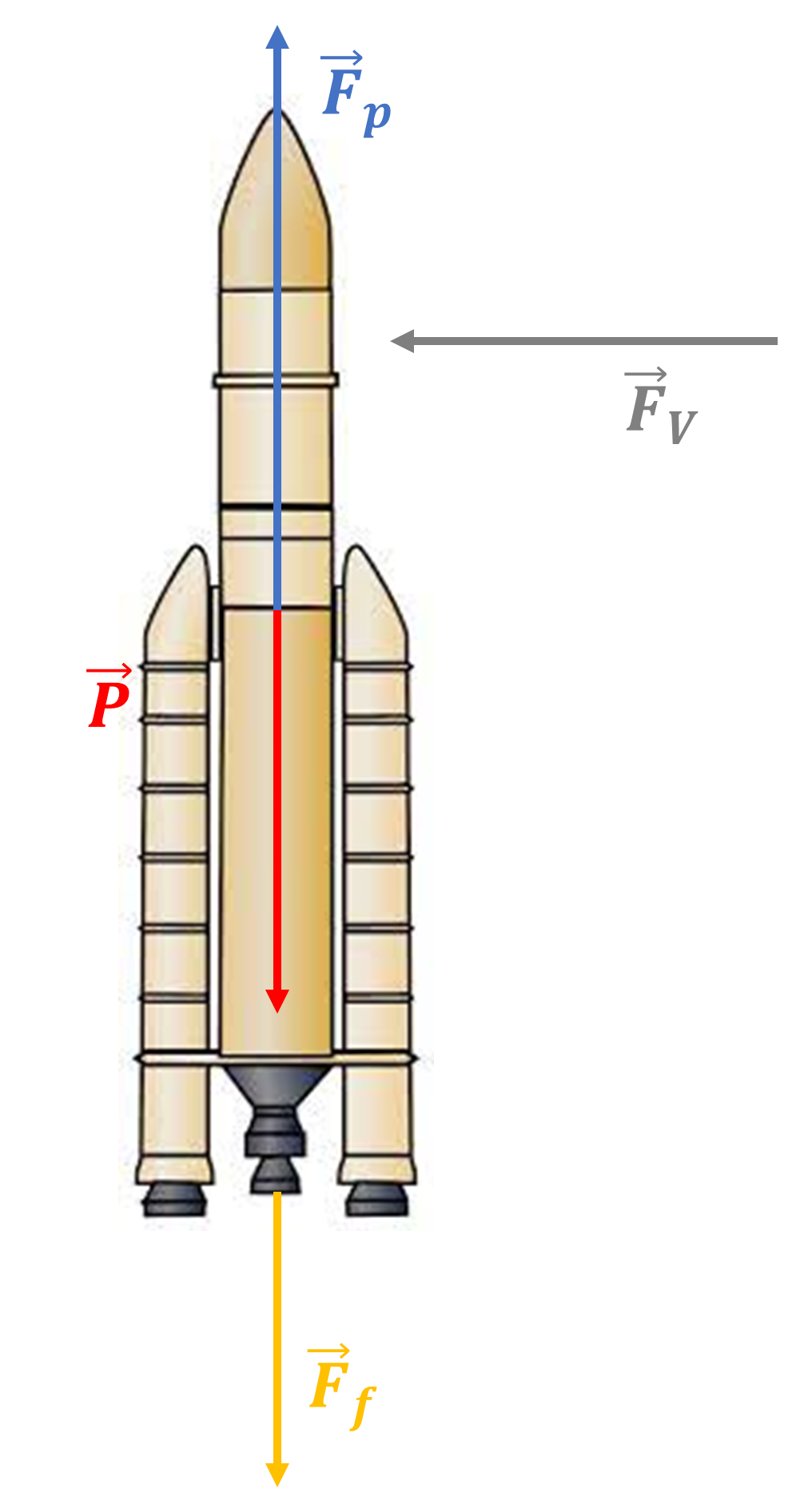
Vous trouvez ci-dessous un schéma représentant les forces qui interviennent sur la fusée :
-
Le poids
C’est la force exercée par la Terre et qui nous attire vers son centre. Le poids est donc toujours orienté vers le bas. Il s’exprime : \(\vec{P}= m\vec{g}\), avec \(\vec{g}\) l'intensité de pesanteur ou accélération de pesanteur.Détails...
-
Les forces de frottements
Elles sont créées par le contact entre l’air et la fusée et elles s’opposent au mouvement de la fusée. Il en existe deux sortes : des frottements laminaires et des frottements turbulents.Détails...
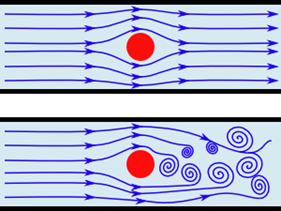
Les frottements sont laminaires lorsque l'air est n'est pas perturbé par le passage de la fusée. Cela arrive seulement à très faible vitesse. Dans ce cas, la force de frottement est proportionnelle à la vitesse : \(\vec{F_L}=-\lambda\vec{v}\).
Les frottements sont turbulents lorsque l'air est très perturbé par le passage de la fusée. Cela arrive presque tout le temps. Dans ce cas, la force de frottement est proportionnelle au carré de la vitesse : \(\vec{F_T}=-\lambda\vec{v}\lVert\vec{v}\rVert\).Le schéma ci-dessus représente le mouvement de l’air au passage de la fusée (représenté par le point rouge). Sur le dessin supérieur l’écoulement est laminaire et sur celui du dessous il est turbulent.
-
La poussée d’Archimède
Cette force s’applique à un objet plongé dans un fluide. Dans notre cas, il s’agit de l’air. Elle correspond à l’opposé du poids du volume de fluide déplacé et prend en compte le volume de la fusée, la masse volumique de l’air et g, l’intensité de la pesanteur : \(\vec{P_a}=-\rho V\vec{g}\). Cette force est donc toujours orientée vers le haut et s’oppose au poids.Détails...
Cependant la masse volumique de la fusée est très grande devant la masse volumique de l’air ainsi la poussée d’Archimède de l’air sur la fusée est négligeable devant le poids de celle-ci.
-
La force du vent
C’est la force que le vent applique sur l’objet.Détails...
Elle s’exprime $$\vec{F_v}=\ \frac{1}{2}C_x\rho \left({\vec{v}}_{vent}\right)^2S$$ avec \(C_x\) : le coefficient de traînée, \(S\) : la surface de la fusée, \(\rho\) : la masse volumique de l’air et \({\vec{v}}_{vent}\) : la vitesse du vent.
-
La poussée
La poussée est une force dont on choisit arbitrairement la valeur, ou qui est donnée par le constructeur de la fusée. Elle n’est présente que sur les premières secondes du lancement afin de permettre à la fusée de décoller du sol. Elle doit donc être supérieure au poids, en norme.Détails...
Application du Principe Fondamental de la Dynamique
Après avoir réalisé le bilan des forces qui agissent sur la fusée, nous appliquons la 2ème loi de Newton, à savoir le Principe Fondamental de la Dynamique (PFD). Celui-ci nous permet de connaître l’accélération de la fusée et (après calcul) d’en déduire sa position à chaque instant. Autrement dit, celui-ci nous permet d’obtenir les équations de la trajectoire selon les trois dimensions.
-
Cas sans frottements
Nous appliquons la deuxième loi de Newton et projetons nos forces sur les trois dimensions : $$\sum{\vec{F}}_{EXT}=m\vec{a}$$ $$\Longleftrightarrow\vec{P}+{\vec{P}}_a+\ {\vec{F}}_V+\ {\vec{F}}_p=m\vec{a}$$ $$\Longleftrightarrow\vec{a}=\begin{cases} \ddot{x}=\frac{F_{Px}+F_{Vx}}{m} \\ \ddot{y}=\frac{F_{Py}+F_{Vy}}{m} \\ \ddot{z}=g\left(\frac{\rho_{air}V}{m}-1\right)+\frac{F_{Pz}+F_{Vz}}{m} \end{cases}$$ Pour les plus curieux d’entre vous, vous trouverez ci-dessous le calcul de la trajectoire en deux dimensions.Détails...
On intègre deux fois ces expressions afin d’obtenir la position. On a donc : $$\begin{cases} x(t)=\frac{F_{Px}+F_{Vx}}{2m}t^2+V_{x0}t+\ x_0 \\ z(t)=\left(g\left(\frac{\rho_{air}V}{m}-1\right)+\frac{F_{Pz}+F_{Vz}}{m}\right)\frac{t^2}{2}+ V_{z0}t+ z_0 \end{cases}$$ Si on prend en compte seulement les forces conservatrices, ici seul le poids en est une, on peut obtenir l’équation de la trajectoire en exprimant z(t) en fonction de x(t). On a: $$\begin{cases} x(t)=\frac{F_{Px}+F_{Vx}}{2m}t^2+V_{x0}t+\ x_0 \\ z\left(t\right)=g\frac{t^2}{2}+\ V_{z0}t+\ z_0 \end{cases}$$ $$\Longleftrightarrow\begin{cases} t=\frac{x\left(t\right)-\ x_0}{V_{x0}} \\ z\left(t\right)=g\frac{t^2}{2}+\ V_{z0}t+\ z_0 \end{cases}$$ $$\Longleftrightarrow\begin{cases} t=\frac{x\left(t\right)-\ x_0}{V_{x0}} \\ z(t)=\frac{g}{2}(\frac{x\left(t\right)-\ x_0}{V_{x0}})²+V_{z0}\left(\frac{x\left(t\right)-\ x_0}{V_{x0}}\right)+\ z_0 \end{cases}$$ On obtient une trajectoire parabolique.
-
Cas avec frottements laminaires
Les calculs sont aussi faisables si on prend en compte des frottements de types laminaires.Détails...
$$\sum{\vec{F}}_{EXT}=m\vec{a}$$ $$\Longleftrightarrow\vec{P}+{\vec{F}}_f+{\vec{P}}_a+\ {\vec{F}}_v+\ {\vec{F}}_p=m\vec{a}$$ $$\Longleftrightarrow\begin{cases} \ddot{x}=-\frac{\lambda}{m}\cdot\dot{x}+\frac{F_{Px}+F_{Vx}}{m} \\ \ddot{y}=-\frac{\lambda}{m}\cdot\dot{y}+\frac{F_{Py}+F_{Vy}}{m} \\ \ddot{z}=g\left(\frac{\rho_{air}V}{m}-1\right)-\frac{\lambda}{m}\cdot\dot{z}+\frac{F_{Pz}+F_{Vz}}{m} \end{cases}$$ La trajectoire obtenue n'est plus parabolique.
-
Cas avec frottements turbulents
Cependant, si on prend maintenant en compte des frottements de types turbulents, les calculs ne sont plus faisables théoriquement car l'équation différentielle ne peut plus être résolut.Détails...
$$\sum{\vec{F}}_{EXT}=m\vec{a}$$ $$\Longleftrightarrow\vec{P}+{\vec{F}}_f+{\vec{P}}_a+\ {\vec{F}}_v+\ {\vec{F}}_p=m\vec{a}$$ $$\Longleftrightarrow\begin{cases} \ddot{x}=-\frac{\lambda}{m}\lVert\vec{v}\rVert\cdot\dot{x}+\frac{F_{Px}+F_{Vx}}{m} \\ \ddot{y}=-\frac{\lambda}{m}\lVert\vec{v}\rVert\cdot\dot{y}+\frac{F_{Py}+F_{Vy}}{m} \\ \ddot{z}=-\frac{\lambda}{m}\lVert\vec{v}\rVert\cdot\dot{z}+g\left(\frac{\rho_{air}V}{m}-1\right)+\frac{F_{Pz}+F_{Vz}}{m} \end{cases}$$ On obtient trois équations différentielles qui expriment l’accélération en fonction de la vitesse. Pour résoudre ces équations, il faut qu’elles soient à coefficients constants. Or, v dépend de \(\dot{x}\), \(\dot{y}\) et \(\dot{z}\) donc tous les coefficients ne sont pas constants, ce qui en fait une équation différentielle impossible à résoudre théoriquement, du moins pour le moment.
Pour résoudre ces équations et obtenir les équations temporelles de la trajectoire, on doit faire appel à des méthodes numériques tel que Euler ou Runge Kutta.
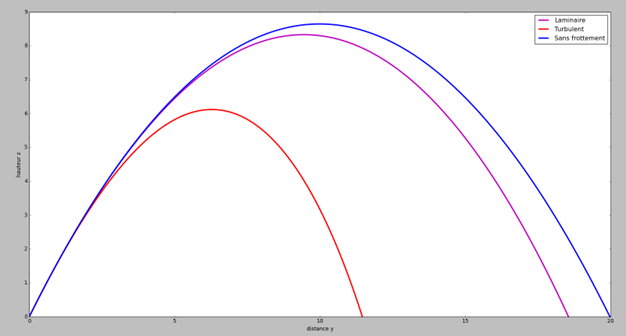
En prenant pour exemple une petite fusée de 7 kg, 80mm de diamètre et 1m de longueur lancée à 15 m/s à 60° d’inclinaison, on peut comparer la trajectoire de la fusée si elle évoluait dans le vide (sans frottements), ou dans l’air avec des frottements laminaires ou turbulents.
Le code de calcul Python qui est à votre disposition utilise ces méthodes numériques afin de tracer les paramètres voulues dans le cas du lancement d’une fusée. Grâce à celui-ci, vous pourrez déterminer la trajectoire d’une fusée avec ou sans frottements ou bien même sa vitesse en fonction du temps. Vous pourrez aussi mettre concrètement en application les principes qui vous sont décris dans cet article et visualiser les trajectoires à l’aide de l’application ci-dessous.
Simulation de trajectoire
Sylvain Schuwer
· Blandine Michel
· Nathaniel Badet--Borri
Télécharger les codes de calculs
Télécharger la simulation de fusée en mécanique du solide, en repère local.Télécharger la simulation de fusée en mécanique du point.
Télécharger la simulation de fusée en mécanique du solide, en repère géocentrique.
Télécharger la simulation du système solaire.